Project Cases Detail
Fast Dynamic Analysis of a Poppet Spring (Burckhardt Compression)

An analysis model has been developed for the simulation of fast dynamic impacts on poppet springs. This work was done for Burckhardt Compression (www.burckhardtcompression.com).
Burckhardt Compression is one of the worldwide market leaders in the field of reciprocating compressors and the only manufacturer that covers a complete range of reciprocating compressor technologies. Its customized compressor systems are used in the upstream oil & gas, gas transport and storage, refinery, chemical, petrochemical and industrial gas sectors.
The model considers a spring which is in a precompressed state between 2 supports rigid plates. The upper support (plate) moves very suddenly down compressing the spring by about 20 pct of it’s length. It was observed that due to the high compression velocity (several 1000 mm/sec) the spring looses the contact to the upper support and looses also the contact at the bottom support after being reflected there.
Several analysis steps have been developed with Code-Aster:
- In a static analysis the mesh (being in a stree-free state of precompression) was “stretched” to the undeformed and stressless state
- A nonlinear static analysis is done to obtain the precompressed state with stresses and contact forces
- A nonlinear dynamic analysis using Code-Aster’s operator DYNA_NON_LINE is subsequently executed
Beforehand a modal analysis has been done to explore the natural frequencies in order to adapt the coefficients of Rayleigh Damping and to decide about the time steps for the dynamic analysis.
With a dynamic analysis the question of stability and precision over the simulation time arises. The integration scheme of Hilber, Hughes and Taylor has been choosen. It is unconditionally stable. It’s numerical damping is insignificant for the lowest, but increasing for the higher frequencies.
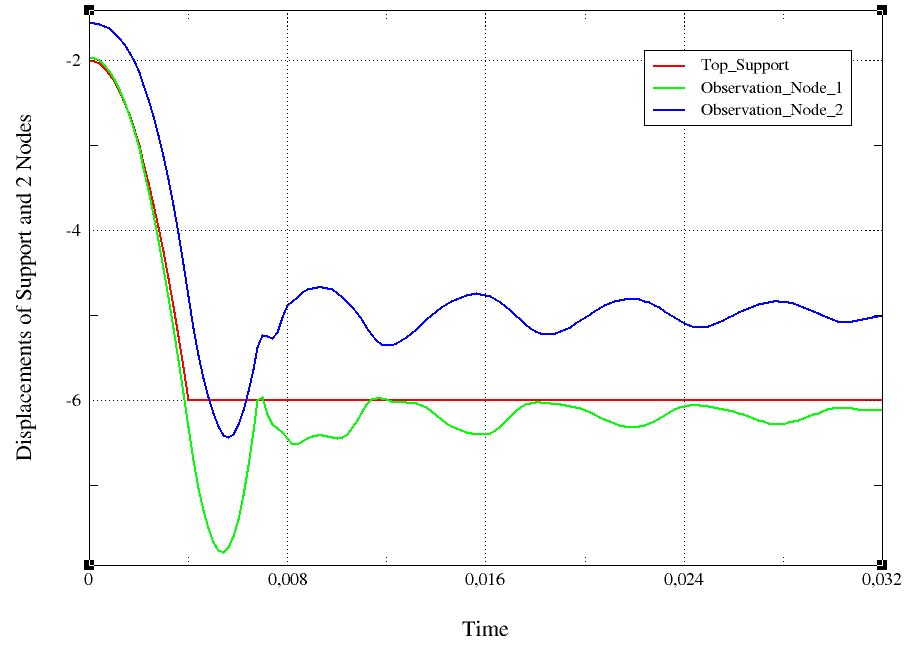
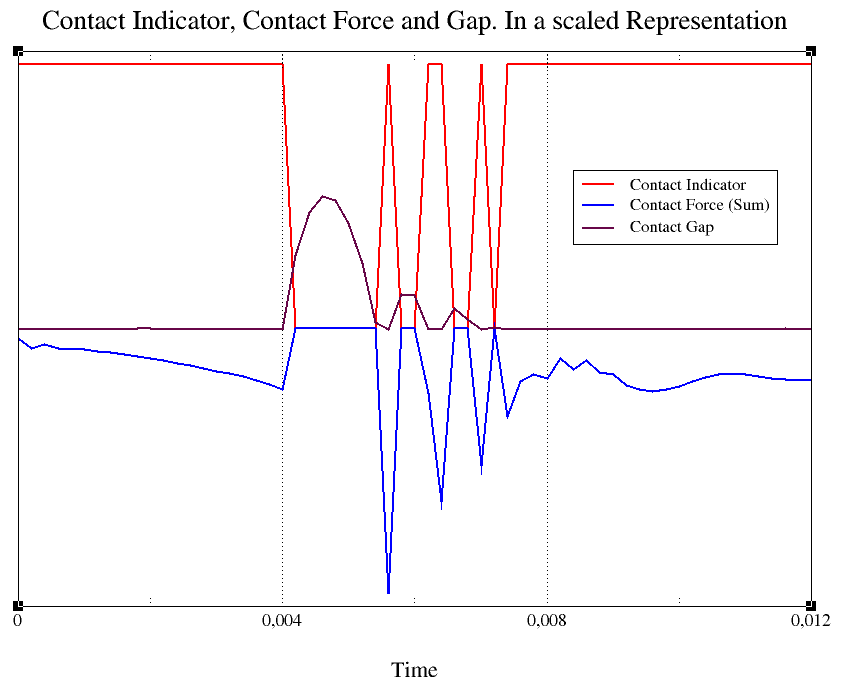
Figure 1 shows the displacement of the top support and two observation nodes over time.
Figure 2 shows the contact indicator (>0 means contact, =0 no contact) together with the contact force and the gap (all curves in a scaled representation). The repeated opening and closing of the top contact can be recognized.
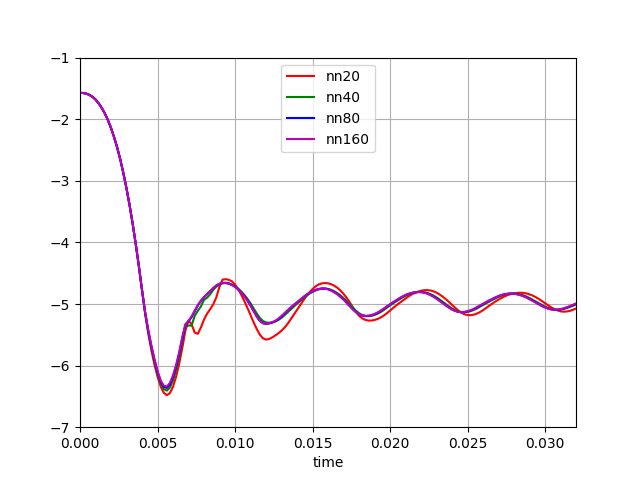
Figure 3 shows the displacement of a “control node” evaluated for different time discretisations. The scope was to validate that inaccuracies due to the “poligonalisation” (too coarsly discretized) of the load history are acceptable.